






















工业机器人和机械臂的区别
工业机器人
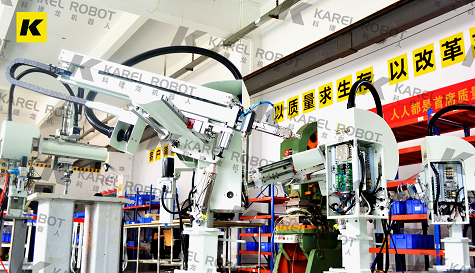
工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器。它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。
工业机器人由主体、驱动系统和控制系统三个基本部分组成。主体即机座和执行机构,包括臂部、腕部和手部,有的机器人还有行走机构。大多数工业机器人有3至6个运动自由度,其中腕部通常有1至3个运动自由度;驱动系统包括动力装置和传动机构,用以使执行机构产生相应的动作;控制系统是按照输入的程序对驱动系统和执行机构发出指令信号,并进行控制。
机械臂
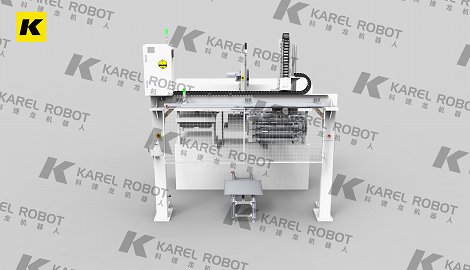
机械臂是指高精度,多输入多输出、高度非线性、强耦合的复杂系统。因其独特的操作灵活性,已在工业装配,安全防爆等领域得到广泛应用。
机械臂是一个复杂系统,存在着参数摄动、外界干扰及未建模动态等不确定性。因而机械臂的建模模型也存在着不确定性,对于不同的任务,需要规划机械臂关节空间的运动轨迹,从而级联构成末端位姿。
工业机器人和机械臂的区别
机械臂是机器人领域中使用最广的一种机械装置,广泛应用于工业、医疗甚至军事、太空领域。机械臂分四轴五轴六轴多轴,3D/2D机器人,独立机械臂、油压机械臂等,虽然种类很多,但它们有一个共同点就是能接收指令并精确定位到三维(或者二维)空间上的点进行作业。
机器人与机械臂不同的是,机器人既可以接收人类的指令,还可以按照人类预先编排好程序执行作业,还可以根据人工智能指定的原则行动。在未来机器人将更多地协助或取代人类的工作,特别是一些重复性的工作,危险的工作等。
欧美国家与日本对机器人的定义
欧美国家认为机器人应是由计算机控制,通过编程使得机器人成为多功能的自动机械;日本则认为机器人是高级的自动机械,所以机械臂就被包含进机器人的定义。
欧美国家认为六轴及以上的机械臂可以称之为机器人,五轴及以下的只能叫机械臂;日本则把3轴机械臂定义为机器人。
现在国际上对机器人的概念已基本趋于一致,都认为机器人是靠自身动力和控制能力实现各种功能的一种自动化机械。

机器人与机械臂在应用范围上的区别
机械臂在工业界应用广泛,其包含的主要技术是驱动和控制,机械臂一般都是串联结构。
机器人主要分为串联结构与并联结构:并联机器人(PM)多用于需要高刚度、高精度、高速度,无需大空间的场合,具体应用于分拣、搬运、模拟运动、并联机床、金属切削加工、机器人关节,航天器接口等;串联机器人与并联机器人在应用上构成互补关系,串联机器人的工作空间大,可以避免驱动轴之间的耦合效应。但其机构各轴要独立控制,而且需要编码器和传感器来提高运动精准度。
注明:文章内容源于网络
上一篇:
 科技创造未来,工业机器人的应用及发展趋势
科技创造未来,工业机器人的应用及发展趋势
下一篇:
 一次性可降解餐盒的类型
一次性可降解餐盒的类型
更多信息:
“以纸代塑”大幕拉开,你关心的问题这里可能有答案 除了当盘子,纸浆模塑制品还能这么用? 是使命也是机遇,纸模企业生产降耗问题如何破?
-
关注我们:
-


